Toiminta ja vastamomentti
Sitten siirrytään tarkastelemaan KP’n toimintojen yksityiskohtia , verrataan niitä vanhaan pyörään , eli miten uudet toiminnat poikkeaa vanhan pyörän suorituskyvystä. Koemallista puuttuu pyöränhallinnassa tarvittavia komponentteja , silti kaikki nämä yksilöidyt toiminnan osiot pystyy näyttämään toteen koemallin avulla , joten ero vanhaan pystytään myös selkeästi erottamaan. Varsinaiset kokonaisdynamiikan tulokset ajossa selviää vasta varsimaisella protolla.
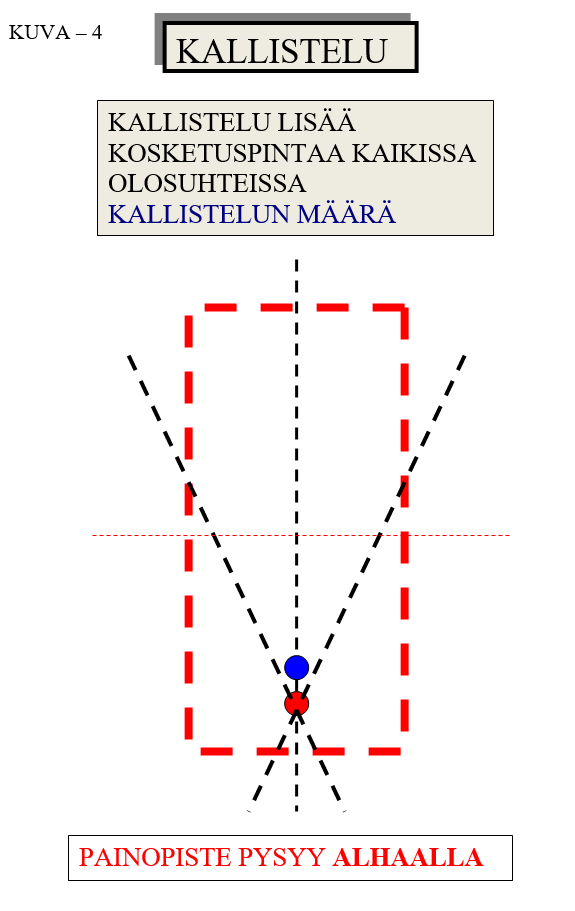
Numero 1. Kallistelu. Ulospäin näkyvistä toiminnoista kallistelu ”pistää silmään” niin paljon , että voi olla mahdollista , että ensi näkemältä poliisin valvova silmä ojentaa auttavan kätensä ja puhalluttaa kuljettajan. Jos tulos on nolla , vaaditaan varmaankin doping näyte kuljettajan lisäksi ajoneuvoltakin. Turmiolan Tommin vaikutuksen voi unohtaa , heilunnalle löytyy kyllä hyvin horjumaton ja luonnollinen selitys , jopa saranat. Pyörän kosketus siis asettuu aina kohtisuoraan ajoalustaan rajoittimien puitteissa ja tietysti yläosa seuraa mukana. Kallistelu voi olla tavallisessa käytössä ± 20 – 30 astetta puolelleen , eli yhteensä 40 – 60 astetta. Tukivarren 90 asteen liikeradan ääripäiden puitteissa kokonaisvaikutus ja sopeutumiskyky yhteen pyörään voi olla jo lähes 180 asteen luokkaa.
Hyvin pienillä muutoksilla erikoisrakenteissa yhden pyörän rajoittamaton kallistelu voi olla äärimmillään paljon enemmän. Tässä tapauksessa pyörän sopeutumisen 180 astetta tarkoittaa sitä , että ajoneuvo voi ajaa pystysuoran muurin harjannetta pitkin , toinen pyörä toisella puolen ja pyörät kohtisuoraan muuriin. 180 asteen toisessa reunassa taas ajetaan kahden seinän välissä korkeudesta riippumatta , siten että toinen pyörä on kohtisuoraan omaa seinäänsä , ja toinen toisella puolen omaa seinäänsä vasten.
Vanha pyörä noudattaa vain ripustuksen sallimia liikeratoja ja 180 asteen saavuttaminen edellyttäisi että ajoneuvo pystyy kulkemaan katollaan , muttei kuitenkaan pysty samaan. Samanlaisia eroja tulee vastaan jatkossakin , vertailussa 0 tarkoittaa sitä ettei ilmiötä aiemmin ollut olemassakaan.
Mitä tästä kallistelusta on maastossa hyötyä. Seurauksena on se , että kosketuspinta laajenee luonnostaan mahdollisimman suureksi , pintapaineet jakaantuu mahdollisimman tasaisesti koko kosketuskohdassa. Jo tämä lisää ratkaisevasti tartunta kykyä , koska osakosketuksista luisto alkaa helpommin. Aivan sama asia toistuu käänteisenä myös ajoalustaan , pistekuormitukset vähenee ja rasitukset tasaantuu suuremmalle alueelle , ajojälki on siistiä. Esteen osakosketuksissa pyörän reunoilla se pystyy ohittamaan ne kallistumalla , ilman että tarvitsisi nousta esteen yli. Painon nostaminen korkeussuunnassa vaatii tietenkin enemmän voimaa. Varsinkin leveillä renkailla esteen kallistumalla ohittaminen säästää polttoainetta ja lisää pitokykyä hyvin paljon. Maastossa jokainen pyörä voi osoittaa toisistaan riippumatta aivan omaan suuntaansa ja hyödyntää suurimman mahdollisen tartunnan paikkakohtaisesti. Tämä koskee myös vaikkapa V muotoista ojaa , jossa pyörä asettuu kohtisuoraan kosketuskohtaan. Sama kohtisuoruus toistuu kaikissa muissakin muodoissa , vaikkapa A muotoisissa harjanteissa.
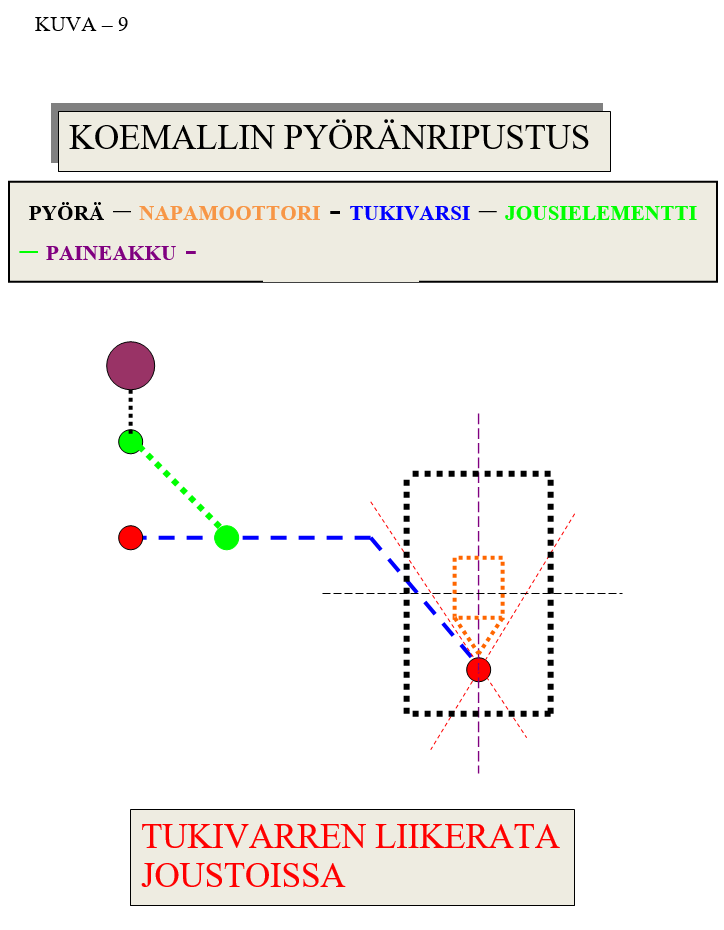
Pyörän sivuttaiseen kallisteluun vaikuttaa alhaalla lähellä pyörän ulkokehää olevat ripustusakselit , jotka jakaa pyörän massan niiden ylä ja alapuolisiksi. Yläpuolinen massa on moninkertainen alapuoliseen nähden , joten ns. turha huojunta ilman vaimennusta on suuri. Vaimennus on yksinkertaista ja toiminnan nopeuden suhteen pyörän ja napamoottorin keveys on etu.
Aiemmin on käytetty ns. kallistuvia pyöriä esimerkiksi tiekarhuissa kumoamaan höyläterän aiheuttamaa sivuttaista vääntöä. Samoin Mersu on tehnyt kallistuvia pyöriä parantaakseen ulkokaarteen puoleisten pyörien pitoa. Niillä ei ole mitään tekemistä KP’n kanssa , kyse on vanhoista pyöristä joiden sivuttaispitoa on yritetty korjata jyrsinterän väännön , tai kaarrevoimien kumoamiseksi. Totta kai moottoripyöräkin kallistuu kaarteissa , mutta siihen on aivan omat syynsä.
Pesäeroa taitaa tulla , sopeutumiskyvyn laskennan yksinkertaistamiseksi , montako prosenttia on 0 ja 180 asteen ero.
Vertailu 1-0 KP’n hyväksi , ero prosentteja on turha edes laskea. Toiminta on kokoaikaista , tai voidaan tarvittaessa lukita.
Numero 2. Pyörän koko. Kaikissa ajoneuvoissa pyörän koko on sovitettava käyttötarpeen mukaan. Pyörä ei voi olla liian suuri eikä liian pieni suhteessa esteisiin , tai ajoalustan kantokykyyn. Maastossa rullaluistimilla ei pärjää , mutta polkupyörällä ajo sujuu. Tarkastellaan sitä geometriaa jonka ajoalustan sivuttainen kallistelu aiheuttaa eri suuruisille pyörille. Tätä voi havainnollistaa kahdella kepillä , toisen pituus on polkupyörän puoli metriä , toisen rullaluistimen kaksi senttiä. Nämä kepit ovat suhteessa samat kuin näiden käytettävien pyörien säteet. Jos näiden keppien alapää pistetään maahan , ja keppejä heilutetaan sivusuunnassa kymmenen astetta puolelleen , samalla kallistuksella polkupyörän puolimetrisen kepin yläpää liikkuu sivusuunnassa paljon enemmän kuin parisenttisen rullaluistimen kepin yläpää.
Ajoneuvossa tämä havaintokepin pituus on ajoneuvon pyörän säteen pituinen. Pyörään kohdistuva paino on nimenomaan juuri sen kepin yläpäässä , eli siis kirjaimellisesti tikun nokassa. Koska ajoneuvon yläosa liikkuu sivu suunnassa kaltevilla pinnoilla , tietysti myös ajoneuvon massakeskiö seuraa mukana. Ajoneuvosta pyörään kohdistuva paino vaikuttaa pyörän navan korkeudella ja joka tietenkin siirtyy sivu suunnassa ajoneuvon kallistelun mukana. Eli siis kallistuskeskiö ja massakeskiö liikkuu sivuttaiskallistuksen myötä. Vaikka vanhan pyörän ajoneuvon kallistuskeskiötä pyrittäisiin alentamaan mahdollisimman alas ripustuksen geometrian avulla , ja vaikka kallistuskeskiö ja massakeskiö olisi formulamaisesti kuinka alhaalla tahansa , viime kädessä pyörään kohdistuvan painon keskiö on aina pyörän navassa. Eli vanhassa pyörässä painopisteen sisäistä sijaintia pyörän navassa ei voi muuttaa.
Pyörän suuruudella on merkitystä ajovakavuuteen. Tätäkin ilmiötä voi havainnollistaa luotilangalla joka on kiinnitetty pyörän navan keskelle. Nyt luotilangan käyttäytymistä tarkastellaan pyörän edestä ajosuunnassa. Kuta suurempi on pyörän säde , sitä kauemmas pyörän kosketuksesta luotilanka poikkeaa sivusuunnassa kun ajoneuvo huojuu , tai sillä ajetaan kaltevalla pinnalla. Suurellakin kuormituksella ja pienellä pyörällä poikkeama olisi hyvin vähän , mutta pieni pyörä on maastossa täysin käyttökelvoton. Ajoneuvon kuorman massakeskiö on hyvinkin korkealla , ja joka seuraa tietenkin alustan huojuntaa.
KP’ssä taas vastaava vipuvarsi on lyhyt. Aiempi jäykkä yhteys pyörännapaan on katkennut. Sitä kuvaa hyvin edellä mainitut polkupyörän pyörän ja rullaluistimen säteiden erot. Vanhan pyörän navan ja maan välinen vipuvarsi on lyhentynyt pyörän kosketuksen ja caster linjan väliseksi etäisyydeksi. Koska caster akseli on hyvin lähellä kosketuspintaa , myös pyörään kohdistuva paino on lähellä pyörän kosketuspintaa , eli pyörään kohdistuva paino ei liiku pyörän säteen pituisen varren päässä. Käytössä olevan suuren pyörän suuri säde lyheni hyvin pienen pyörän säteeksi. Sivuttainen huojunta kallistuksissa vähenee , eli siis ajoneuvon massakeskiön liike vakavoituu aivan samassa suhteessa.
Myös pyörään kohdistuva paino kohdistuu alhaalle ja vielä selkeästi pyörän kosketuksen keskiviivalle , eikä heilu korkeammalla pyörän keskiön mukana. Ero vanhaan pyörään on valtava kaikissa suhteissa , vaikka kyse on vielä vain painopisteen alenemisesta pyörän navasta lähelle ajoalustan kosketuskohtaa. Edut tulee selkeästi esiin kun ajetaan rinteen poikkisuuntaan ilman mitään asentoa korjaavia toimenpiteitä.
Tarkennetaan vielä pyörän sisällä tapahtuvaa voimien ja dynamiikan muutosta.
KP rakenteella pyörän toiminnassa on kaksi aluetta , pyörän omapaino , ja caster akselille tukivarren kautta tuleva paino. Pyörän omapainokin jakaantuu caster akselin ylä ja alapuolisille osille. Pyörään kohdistuva paino taas vaikuttaa caster akselin tasolla. Pyörän sisällä on tietenkin kiinteä yhteys ajoalustaan levypyörän ja sen navan kautta , mutta paino vaikuttaa vain vipusuhteella caster akselin ja pyörän kosketuksen välillä. Nivelrakenteen ansiosta kiinteä yhteys tukivarteen katkeaa , joka oli aiemmin mahdotonta.
Toiminnan nopeuden kannalta on etua että pyörän omapaino on mahdollisimman kevyt , koska silloin se pystyy noudattamaan nopeammin ja paremmin ajoalustan muotoja. Pyörään kohdistuva paino vaikuttaa tietenkin toimintaan , mutta vipusuhde rajoittaa vaikutuksen hyvin pieneksi.
Tällä rakenteella yhdistetään pienen ja suuren pyörän edut. Suurella pyörällä on suurempi kosketuspinta , ja parempi esteenylityskyky , painopiste alenee lähelle pyörän kosketusta.
Jotta caster akseli saadaan lähelle pyörän ulkokehää , renkaan rakenne ja profiilisuhde muuttuu ratkaisevasti. Uusilla rakenteilla vältetään myös vanhoissa rakenteissa ilmeneviä haittoja. Vanhojen rakenteiden yhtenäinen suuri ilmatila palauttaa renkaan joustossa latautuneen voiman välittömästi. Joustossa sitoutunut voima palautuu nopeasti , eli siis ”pyörä pomppaa” ja ote esteestä irtoaa.
Uudessa rakenteessa jousitus hoitaa kaiken sen alueen , johon vanhojen ajoneuvojen ilmarenkaat on tarkoitettu. Tämän liikevaran sisään ja ulosjouston ominaisuudet ovat täysin hallittavissa nesteenvirtaaman avulla. Uusi teknologia vaatii matalaprofiilisen ns. ”letkurenkaan”. Silloin esteen aiheuttama sisäinen paine nousee vain vähän , ja rakenteesta johtuva ulkopinnan ratkaisevasti parantunut muotoutumiskyky nostaa pitokykyä sopeutumalla ajoalustaan aivan uudella tavalla.
Vertailu 2-0 KP’n hyväksi. Hyötyvaikutus ja ero vanhaan on prosentteina on taas hyvin suuri , lisäksi toiminta on täysin kokoaikaista. Aiempia pienen ja suuren pyörän ongelmia on ratkaistu.
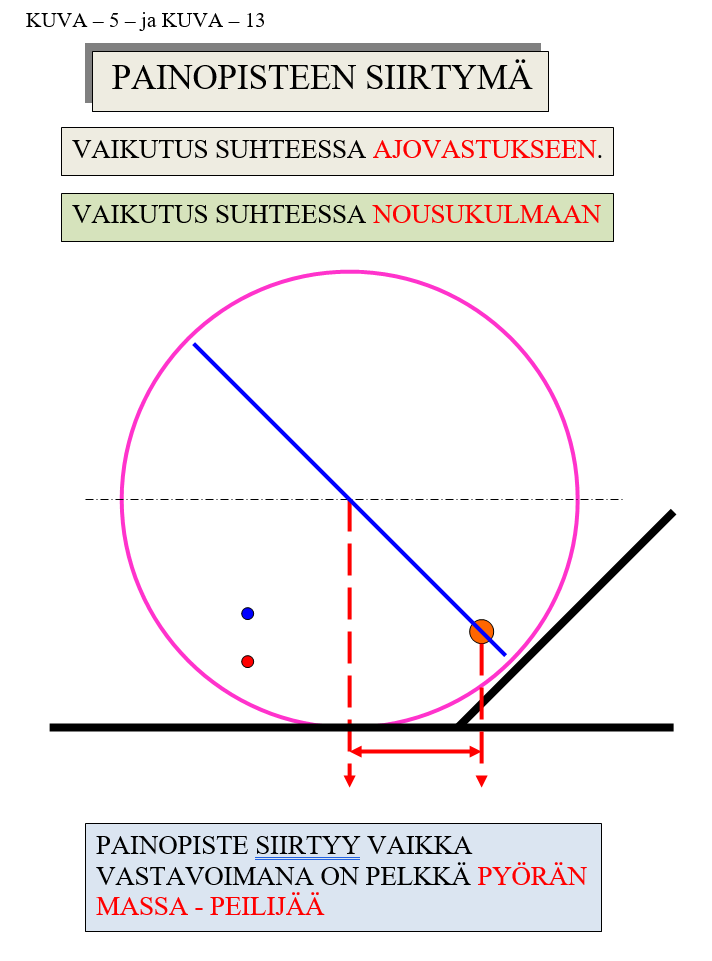
Numero 3. Painopisteen sijainnin vaikutus maastossa ajamiseen. Vanhassa pyörässä painopiste on aina pyörän navassa , niin levossa kuin ajossa. Edellä esitetty luotilanka toimii myös painopisteen kiinteän aseman vaeltelun kuvaamisessa ajoalustan kallistusten myötä. Tässä tapauksessa luotilangan käyttäytymistä katsotaan sekä pyörän sivu , että pituus suunnassa. Ylämäessä painopiste jään pyörän kosketuksen jälkipuolelle ja heikentää ratkaisevasti pitokykyä. Alamäessä painopiste kiirehtii pyörän kosketuksen edelle , myös heikentäen pitokykyä. Sivuttaiskallistumissa painopiste jää aina alamäen puolelle. Sivuttaisvoimien ansiosta pyörän tartuntakyky alenee ja aiheutuu luistoa , joka suurenee kalistuskulman suuruuden myötä.
KP’ssä paino lepotilassa on caster linjan 1-2 nivelillä , ja tietenkin myös 2-3 nivelillä. Liikkeelle lähdössä ja ajovastuksesta vastamomentti siirtää painon ajosuunnassa eteenpäin täysin nivel ykköselle. Silloinhan pyörään ajoneuvosta kohdistuva paino siirtyy täysin kosketuksen etureunaan. Vajonneessakin pyörässä painopiste on pyörän edessä olevan kiilan päällä ja vetokyky hyvä. Tästä johtuen KP pyrkii vedossa aina ylöspäin , päinvastoin kuin vanha pyörä joka pomppii ja pyrkii luistoissa alaspäin.
Liikkeelle lähdössä vastavoimana on ajoneuvon oma paino. Liikkeelle lähdön jälkeen painon siirtää ajovastukset tai esteet. Maaston pehmeydestä johtuu että ajovastusta on aina. Tämä ilmiö auttaa pitokykyä kaikissa tilanteissa , omissa kokeissa peilijäästä lumeen. Peilijäällä kiihdytettäessä kitkakerroin on hyvin pieni , silloin painon siirtymän vastavoimana on pyörän oma massa. Lumikokeissa todellinen pitokyky paljastuu parhaiten , koska silloin tartunta täytyy saada mahdollisimman neutraalilla kosketuksella. Käytännön kokeissa ero pitokyvyssä oli parhaimmillaan useita satoja prosentteja. Lumikokeita selostan lisää myöhemmin.
Esteen ylitys on vanhan pyörän ratkaisevia heikkouksia. KP’n rakenteella painopiste siirtyy mahdollisimman lähelle pyörän ja esteen kosketuskohtaa , päinvastoin kuin vanhassa pyörässä. Lisäksi painopiste säilyy aina kosketuskohdassa ajoalustan kallistuksista huolimatta.
Mäennousussa painopisteen asema muuttuu suhteellisesti vieläkin edullisemmaksi. KP’n rakenteilla tehdään uudet ennätykset vauhdittomassa rinteen nousussa. Näitä kokeita odotan mielenkiinnolla.
Vertailu 3-0 KP’n hyväksi. Pitokyvyssä ero vanhaan prosentteina valtava. Toiminta on kokoaikaista kun ajoneuvo liikkuu.
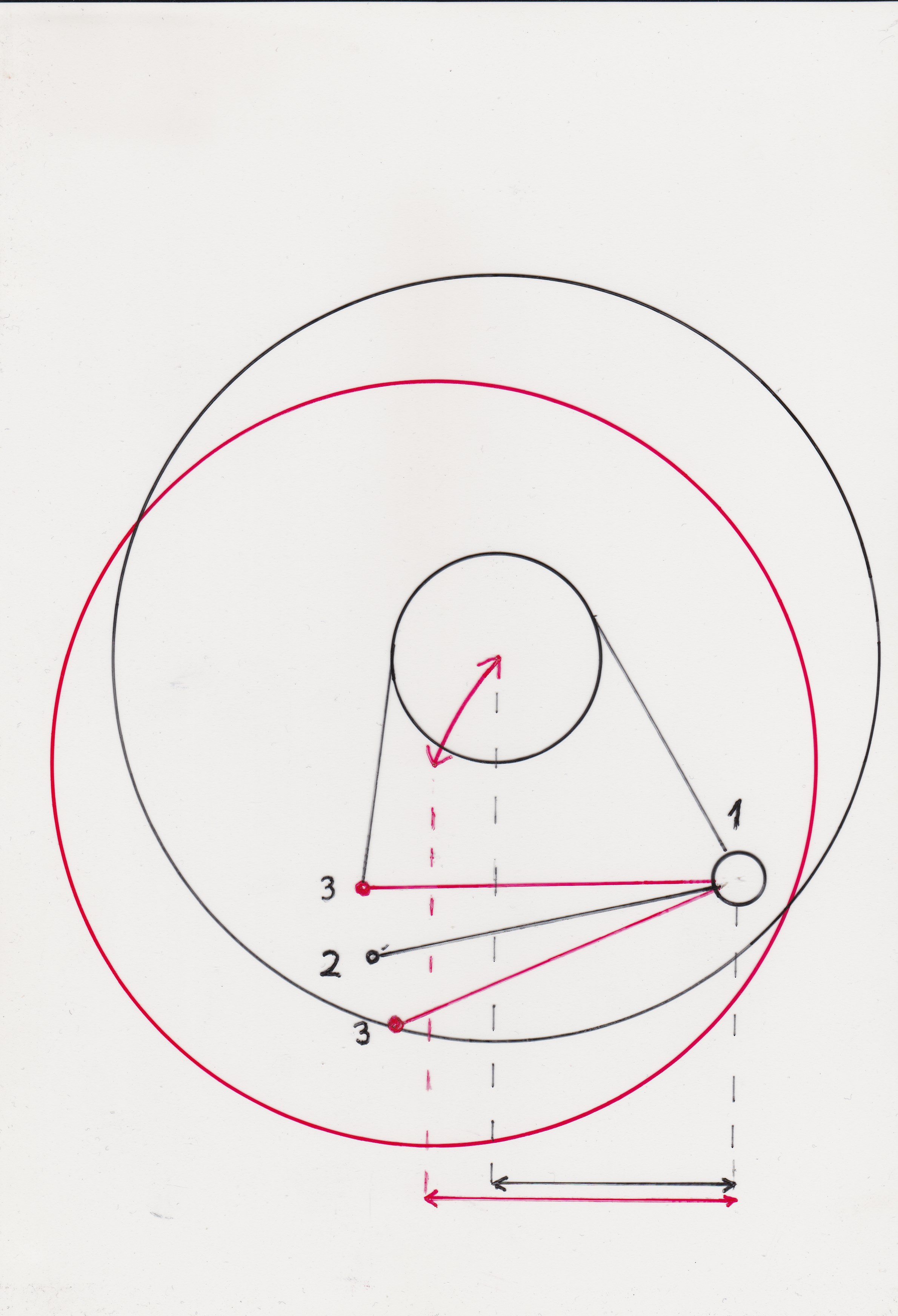
Numero 4. Itseohjautuvuus. Seurauksena on se , että pyörä ohjautuu ja noudattaa ilman sivuttaisia luistoja tukivarren liikerataa. Tartunta ja pitokyky säilyy mahdollisimman lähellä lepokitkaa. Niin sanottu rautalanka malli syntyy kun teette paperi klemmarista L kirjainta muistuttavan mallinteen. Rautalangan kärki on nivel ykkönen , josta lähtee suora osuus nivel 3. keskelle. Nivel 3. sisällä tulee taivutus kohti nivel 2. keskipistettä.
Ajoneuvon ja ajoalustan välisessä vuorovaikutuksessa pyörän jäykän osan toimintaa ohjaa joustava ajoneuvon puoleinen osa rakenteesta.
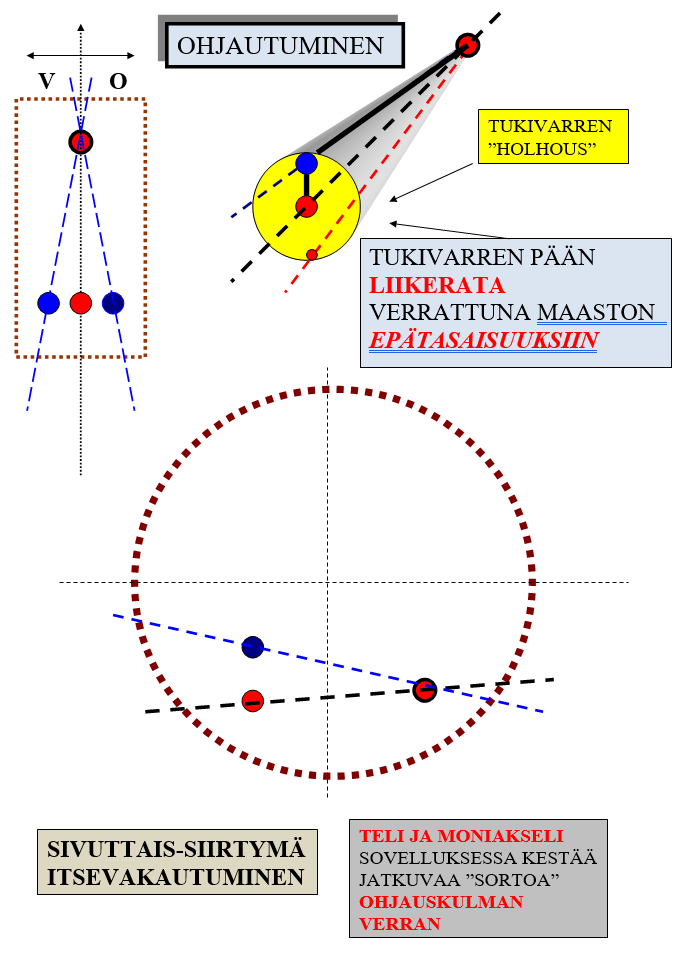
Jos nyt katsotte tätä mallia suoraan ylhäältä päin , kaikki nivelet ovat samalla suoralla , ja tilanne on lähtökohta jos KP pyörä on paikoillaan tasaisella alustalla. Rakenteen laidasta laitaan liikeradat muodostaa suppilomaisen kartion jonka kärjessä on nivel 1. Kartion pohjassa taas kellotaululla esitettynä tilanne on seuraava. Nivel 2 on kellotaulun keskellä ja nivel 3 kiertää kellotaulun ulkokehää. Lepotilassa nivel 2 on kellotaulun keskellä ja nivel 3 kello 12 kohdalla. Jos sitten ajatellaan että tukivarteen kiinnittyviä niveliä 1-2 työnnetään jompaankumpaan suutaan sivulle , nivel kolmonen ”jää jälkeen” ja paikoilleen. Silloin nivelten 1-3 välille syntyy poikkeavaa kulmaa. Syntyvä kulma on nimeltään ohjauskulma , ja pyörä noudattaa juuri tätä kulmaa , eli kulma synnyttää pyörään sitä sivu-suunnassa ohjaavan vaikutuksen. Ylhäältä päin katsottaessa nivelten 1 ja 3 välille syntyvä kulma poikkeaa aiemmalta 1-2 nivelten väliseltä suoralta , joka säilyy edelleen täysin ajosuunnassa. Pyörä noudattaa aina ohjausta niin kauan kuin sivuttaista voimaa riittää. Eli pyörä ohjautuu näiden kolmen nivelen toiminnan yhteisvaikutuksesta. Kuta voimakkaampi tämä sivuttainen tukivarren aiheuttama voima on , sitä suurempi on myös ohjaava kulma.
3D toiminnassa nämä kolme niveltä 1-2-3 muodostaa toiminnan jotka ohjaa painon siirtymää , itseohjautuvuutta ja vastamomentin syntymistä. Kaikki nämä toiminnot toteutuu samanaikaisesti.
Suurimmillaan itse ohjautuminen on 2x steering anglen suuruinen. Jos asetus on 10 astetta , pyörän kokonais- kääntymä laidasta laitaan on 20 astetta. Kellotaululla esitettynä ohjautuvuuden ääripäät ovat kello 9 ja kello 3 välillä. Tästä toiminnasta syntyy ilmiö jonka nimesin neutraaliksi kosketukseksi. Koska sivuttaiset voimat eliminoidaan , pyörän kosketus säilyy mahdollisimman lähellä lepokitkaa. Sivuttaisvoimista vapaa neutraali toiminta on ilmiönä niin tehokas , ettei KP riko ajoalustaa lainkaan vaikka pyörä liikkuu joustoissa sivusuunnassa tukivarren liikeradan mukaan. Samalla päästään eroon vanhojen sivusuunnassa täysin jäykkien alustojen ilmiöstä , että yhden pyörän toiminta tai este heijastuu kaikkiin muihin pyöriin.
Eli siis uusi rakenne vaimentaa pyörästä ajoneuvoon kohdistuvia voimia , kuin myös ajoneuvosta pyörään kohdistuvia voimia. Yhdessä rakenteen muiden ominaisuuksien kanssa pitokyky säilyy mahdollisimman lähellä lepokitkaa. Toiminta on hyvin herkkää , videokuvissa nivel 3 ”elää” sivusuunnassa jatkuvasti lähes tasaisellakin ajoalustalla. Suuremmissa vastuksissa ohjauskulmat suurenee.
Rakenteeseen liittyy myös täysin mekaaninen rautavälitteinen itsestäänselvyys. Jos pyörän etureuna kohtaa keskiviivan jommalta kummalta puolen tahansa esteen , tämä voima siirtää aina itse nivel 3 vastakkaiselle puolelle. Pyörä siis ohjautuu itse estettä päin , ottaen siitä suuremman mahdollisen kosketuksen. Tässä tapahtumassa nivel kolme kiertää nivel kakkosta , ja tämän liikeradan aiheuttaman ”taakse jouston liikerata rauhoittaa” kosketuksen ylitysvaiheessa. Vastaavassa tilanteessa vanha pyörä taas pyrkii kimmahtamaan ja hylkimään estettä , sekä pituus että sivuttais-suunnassa.
Jos ahtaissa paikoissa halutaan rajoittaa pyörien kallistelua , se voidaan lukita rakenteeseen kuuluvalla rajoittimella. Kallistumisen rajoituksenkin aikana toimii sisäinen painon siirtymä , itseohjautuvuus ja vastamomentin hyödyntäminen. Tämä taas tarkoittaa sitä , että näitä ominaisuuksia voi käyttää tasamaallakin. Näillä ominaisuuksilla saavutetaan ratkaisevasti parempi vetokyky. Suurta vetokykyä tarvitaan raskaiden esineiden , esimerkiksi suurten lentokoneiden siirtelyssä.
Joskus on myös tarvetta käyttää kapeita renkaita , vaikkapa rivi-viljelmillä jyrkillä rinteillä. Silloin estetään pyörän kallistuminen kiinteällä tangolla. Painon siirtymä ja vastamomentti säilyy. Tukitangon geometria sovitetaan tarpeen mukaan.
Vertailu 4-0 KP’n hyväksi. Ero yksittäisenäkin tekijänä on prosentteina valtava. Tämäkin toiminta on kokoaikaista aina kun ajoneuvo liikkuu.
Numero 5. Vastamomentin hyödyntäminen. Ajoneuvoissa käsite vastamomentti on esitettävissä hyvin yksinkertaisella esimerkillä. Jos pyörää pyöritetään vetoakselilla , niin pyörään kohdistuvan voiman suuruinen , yhtä suuri vastakkais-suuntainen voima kohdistuu siihen pisteeseen josta välitettävä voima lähtee. Ajoneuvoissahan se on vetopyörästö.
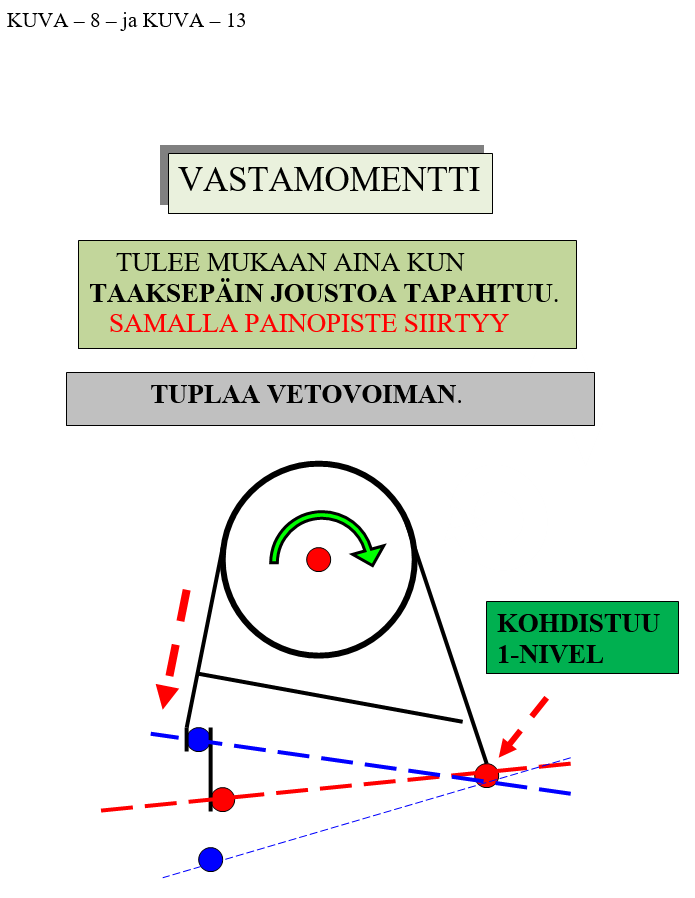
Aiemmin tätä voimaa ei voinut juuri hyödyntää tavallisessa ajossa , ei liikkeelle lähdössä , eikä esteen ylityksessä. Moottoripyörissä trial ajajat nostaa kuitenkin sen avulla etupyörän esteen päälle. Traktor pullingissa tai kiihdytys kilpailuissa etupyörät nousee ilmaan ja vastamomentti siirtää koko painon vetäville pyörille , ja voi sillä kaataakin vetovehkeen. Muutoin ilmiöllä on lähes aina kielteinen vaikutus , varsinkin etuvetoisissa autoissa. Ilmiö ”keventää” vetopyörien otetta.
Vasta nyt , ensimmäisen kerran ajoneuvojen ja pyörän historiassa , myös vastavoiman käsitettä voidaan käyttää hyödyllisessä merkityksessä.
KP’n rakenteissa sähköinen tai hydraulinen vetomoottori on pyörän navassa. Vetomoottorin sisällä on lyhyt akseli johon pyörä on kiinnitetty , ja sitä pyörittävä voima kohdistuu. Silloin vastavoima kohdistuu luonnostaan pyörittävän napamoottorin kuoriin. Eli akselin kautta tapahtuva pyöritysvoima ja sen käänteinen vastavoima kohdistuu samaan lähteeseen. Napamoottorin kuoriin kohdistuva vastavoima on suunnaltaan päinvastainen kiertoliikkeessä kuin akseliin kohdistuva eteenpäin ajon voima. Tämä vastavoima vaikuttaa nivel kolmoseen , joka lähtee kiertämään nivel kakkosta. Tässä kiertoliikkeessä steering axle kiertää caster axlen ympäri , joiden molempien linjojen keskipiste on nivel 1 keskipisteessä. Vastamomentti toimii siis nivel 3 liikeradalla ylimmästä asennosta alimpaan , eli kellotaululla esitettynä kahdestatoista kuuteen , sekä kello 9 , että kello 3 kautta.
Liikerata on aivan sama kuin edellä olevassa itseohjautuvuus selostuksessa. Vastamomentin ilmenemisen ääripäät ovat tosin korkeussuunnassa , eikä sivuttaissuunnassa. Kolmen nivelen toiminta muodostaa yhtaikaiset keskeiset toiminnat , painonsiirtymän , pyörän itseohjautuvuuden , eli neutraalin kosketuksen ja vastamomentin hyödyntämisen. Näiden toimintojen aikana pyörä liikkuu kaikissa kolmessa ulottuvuudessa , joten niistä muodostuu 3D toiminta. Sama mekanismi sopeutuu kaikkiin ajoalustasta vaikuttaviin voimiin yhtä aikaa.
Esteen ylityksessä pyörään kohdistuu hetkittäinen lisävoiman tarve , koska pyörään kohdistuvaa painoa täytyy nostaa ylemmälle tasolle. Aivan sama ilmiö kuin portaiden nousussa ihmisille. Kauneinta vastamomentin hyödyntämisessä on se , että hyödynnetään liikkumiseen tarvittavan voiman vastavoima. Vastamomentti on siis ”ilmaista” voimaa”. Vaikutus syntyy välittömästi ilman viiveitä tai mitään ulkopuolista ohjausta , koska mekaaninen rakenne välittää ohjaavat voimat. KP pystyy hyödyntämään aiemmin käyttökelvotonta tai haitallista vastavoimaa. Edellä kerroin vanhan pyörän käyttäytymisestä esteen ylityksessä. Tämä vastavoiman hyödyntäminen on suurin syy siihen , että vaikka suorituskyky ja hyötysuhde nousee , polttoaineen kulutus laskee.
Esteen ylityksessä pyörään kohdistuvaa painoa täytyy nostaa esteen korkeuden verran. Voimantarve on tietysti suurin kun pyörä nousee esteen ylimpään korkeuteen. Juuri tämän matkan KP’n vastamomentti vaikuttaa , eli siis nostaa pyörään kohdistuvaa painoa korkeus-suunnassa. Esteen ylityksen jälkeen nivel 3 palaa alkutilaan , ja on valmis uuteen vastaavaan toimintaan.
KP’n toiminnassa painon siirtymä eteenpäin , itseohjautuvuus ja vastamomentin hyödyntäminen tapahtuu kaikki samojen liikeratojen puitteissa. Toisin sanoen kaikki toiminnat kietoutuu yhteen. Jos ajateltaisiin että kaikki nämä toiminnot ”tehtäisiin” ulkopuolelta tulevalla ohjauksella , ja jos yritetään kiertää kehittämäni rakenne , tilanne johtaa mahdottomuuksiin. Erillisinä nämä toiminnot johtaa vain umpikujaan , toisin sanoen esittämäni rakenne on ainut mahdollisuus.
Mekaniikassa toimintojen ulkopuolinen säätö ja ohjaus vaatii tunnistimia , joiden antamalla tiedolla ulkopuolisen voiman avulla , ja rakenteeseen sisällytetyllä mekaniikalla ohjausliikkeet suoritetaan. Ei ole olemassa niin nopeaa laskentaa ja ohjausta että se voittaisi edellä esittämäni mekaanisen rakenteen ohjailukyvyn.
Mekaanisen toteuttamisen lisäksi on mahdotonta ohjata vähintään kolmea erillistä vaikuttajaa ja laskea niiden säätöarvot jotka sopii kokonaisuuteen , vieläpä nanosekuntien pituisena ajanjaksona. Vaikka laskenta pysyisikin mukana , ohjaavat voimakomponentit jää auttamatta jälkeen , ja mihin sijoitettaisiin ulkopuolista voimaa tuottavat komponentit. Eli siis tällä rakenteella ”passiivinen” tunnistus ja sen ohjaama toiminta voittaa nopeudessa ”aktiivisen” ulkopuolelta ohjatun rakenteen. Nyt käsitteet aktiivinen tai passiivinen ohjaus ja toiminta täytyy miettiä uusiksi.
Pyörän kallistelu vapaasti tai ohjattuna on jo aiemmin tunnettu toiminta. Sen sijaan selostamani toiminnot , itseohjautuvuus , painon siirtymä ja vastamomentin hyödyntäminen , ovat aiemmin tuntemattomia toimintoja. Näitä toimintoja ei voi saada aikaiseksi kuin kehittämälläni rakenteella. Tämän todistin 20.3.2013 TTY’llä pitämälläni luennolla.
Vertailu 5-0 KP’n hyväksi. Hyötysuhteen ero prosentteina vastamomentin hyödyntämisen ansiosta on taas valtava. Suorituskyvyn noususta huolimatta polttoaineen kulutus laskee jopa viidesosaan kaikista edellä esitetyistä syistä.
Numero 6. Nopeuden hidastuminen esteen ylityksessä. Pyörän uusissa toiminnoissa on myös muutamia hyvin tärkeitä yksityiskohtia. Esteen ylityksessä tapahtuu yhtä aikaa monia yksityiskohtia. Kun KP ylittää estettä , ulkoapäin tarkastellessa ei huomaa muuta nopeuseroa kuin pienen hidastumisen , muihin pyöriin verrattuna. Hidastuminen johtuu siitä , että nivel 3. alkaa kiertää nivel 2. ja sen liikeradan aikana vastamomentti nostaa nivel 1 korkeammalle tasolle. Eli ajoneuvosta kohdistuvaa painoa nostetaan korkeampaan asemaan , joka suoraan edesauttaa esteen ylittämisessä. Tämä hidastus ilmiö on hyvin merkittävä , koska se estää pyörää ”kimmahtamasta” taaksepäin , ja estää siten myös kosketuksen menetyksen. Koska samalla painopiste siirtyy nivel ykköselle , pyörän pitokyky esteen pinnasta on suurin mahdollinen. Kimmahduksen estämisen lisäksi hidastus ilmiö myös ”rauhoittaa” kosketuksen ja edesauttaa kosketuksen pysymistä lepokitkan alueella. Kun este on ylitetty , tilanne purkaantuu ja pyörän suhteellinen nopeus verrattuna toisiin pyöriin muuttuu hetkeksi nopeammaksi kun nivel 3 palautuu alkutilaan.
Vertailu 6-0 KP’n hyväksi. Tartuntakyvyn parantamisessa ero prosentteina valtava. Ilmiö estää pyörää ”kimmahtamasta” kovastakaan esteestä. Vanhassa pyörässä juuri kimmahtaminen yhdessä muiden ominaisuuksien kanssa aloittaa luiston hyvin herkästi. Kimmahdusherkkyys paljastuu hyvin kokeessa , pudottakaa irtonainen auton pyörä ja todetkaa sen pomppiminen.
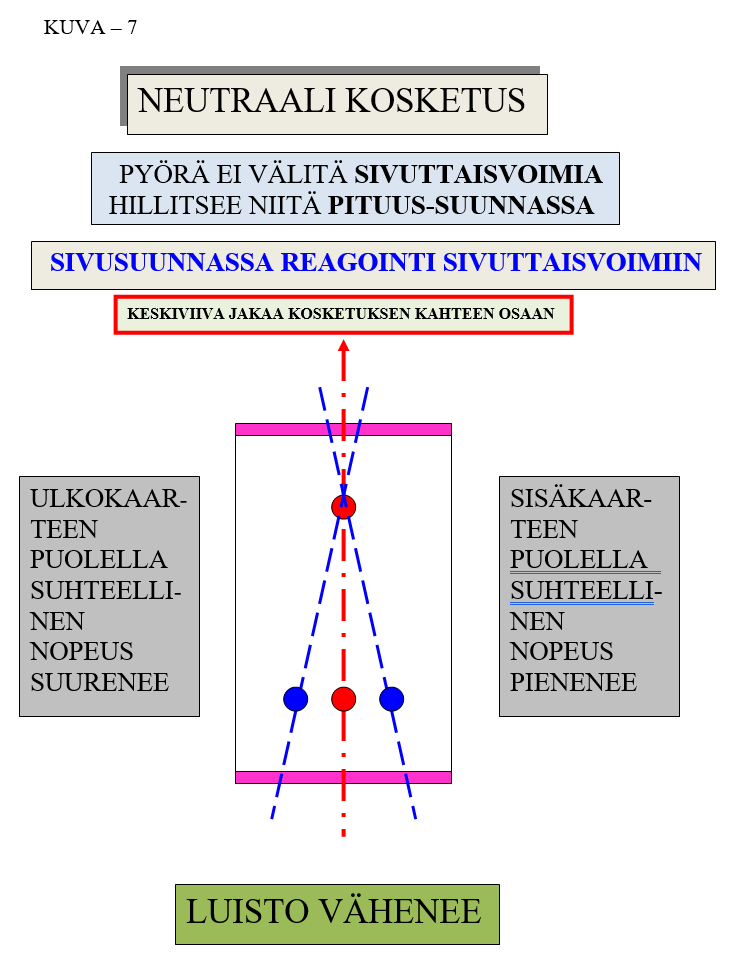
Numero 7. Ohjautuminen kaarteessa. Kun mitä tahansa pyörää käännetään ja ohjataan noudattamaan tiettyä kääntöympyrää , siitä seuraa , että pyörän kääntöympyrän keskipisteen puoleisen reunan nopeus vähenee , verrattuna ulkopuoleisen reunan kehänopeuteen. Tämä on peruslähtökohta ilmiölle jota kutsutaan sortumaksi ohjautumisessa. Vanhassa pyörässä ei ole mitään sellaista ominaisuutta joka suuntaisi kehänopeuksien eroa pyörän keskiviivalle , joka on luonnollisin kohta sortuman aiheuttamien voimien tasaamiseksi ja siten haittojen minimoimiseksi. Sortumaa lisää vielä se , että vanhan pyörän vetoteho suuntautuu lisäksi selkeästi pois kääntöympyrästä. Vedon tehosuunta aiheuttaa lisää sortumaa , sekä pitokyvyn ja ohjautumiskyvyn menetystä. Kuta suurempi vetoteho on , sitä enemmän pyörä menettää pitokykyään , eli aliohjaa. Tämä sortuminen tietenkin rikkoo maastossa ajoalustan pinnan ja samalla ilmiö rajoittaa pienintä kääntöympyrää. Lisäkääntäminen vain lisää sortumaa , ilmiö siis rajoittaa jyrkästi liikehtimiskykyä. Vanhassa pyörässä ei yksinkertaisesti ole mitään ominaisuutta joka pystyisi lieventämään ja kompensoimaan kehänopeuksien eroa ja sortuman vaikutusta.
KP’n toiminnassa kosketus muuttuu ratkaisevasti myös käännöksessä. Ylhäältä päin katsottuna caster linja sijaitsee pyörän keskiviivalla , tämä jakaa selkeästi kosketuksen sisä ja ulkoreunan. Tästä seuraa se , että pyörän sisä ja ulkoreunan välisestä nopeuserosta johtuen nivel 3 asettuu itsestään sellaiseen asentoon , joka tasaa reunojen välistä nopeuseroa. Eli rakenne hienosäätää ohjautumista ja auttaa pyörää noudattamaan kääntöympyrän keskiviivaa , ja vähentää sortuman vaikutusta. Nivel 3 aiheuttaman ”lisäkääntämisen” ansiosta vetoteho suuntautuu lisäksi enemmän kääntöympyrän kehälle , eikä poispäin.
Tuloksen huomaa sillä samalla hiekkakentällä , jolla ajoimme vanhalla pyörällä. Vielä havainnollisemmin pyörän toiminnan jättämät jäljet näkyy kun ajetaan lumisella alustalla. Koemalli Terrierissä on pyörissä hyvin karkea kuviointi , eron huomaa hyvin jäljistä. Jos nivel 3 lukitaan liikkumattomaksi , on tulos sama kuin edellä selostetussa vanhan pyörän kääntymiskokeessa. Nivel vapaana tuloksena on taas säteettäinen kuvio jonka kulutuspinnan poikittaiset kohoumat jättää. Jopa alle metrin kääntöympyrässä hiertymä on pieni. Lumessa käyttäytymisen ero näkyy hyvin selvästi. On selvää että suurinta mahdollista tartunta ja kääntymiskykyä tarvitaan vain hitailla nopeuksilla. Suurilla nopeuksilla kääntymistarve on luonnollisista syistä hyvin erilaista. KP’n rakenne muodostaa ”automaattisen” ja yksilöllisen ohjautuvuuden ajoalustan ehdoilla , ilman mitään ulkopuolista ohjausta.
Vertailu 7-0 KP’n hyväksi. Ero vanhaan prosentteina valtava yksittäisenäkin ominaisuutena. Ilmiö auttaa lepokitkan säilymistä myös kääntymisessä.
Numero 8. Hyrrävoimat. Moottoripyörällä ajo olisi melkoisen vaikeaa ilman vakauttavaa hyrrävoimaa. Hyrrävoimat vaikuttaa kaikissa pyörissä , autoissakin. Hyrrävoimat eivät vaikuta liikkeeseen korkeus , pituus ja sivuttais-suunnassa , ainoastaan silloin kun pyörää käännetään ohjaamisessa. Sen vaikutus on helppo tuntea kun pistätte porakoneen istukkaan keskireiästään pultilla kiinni suurehkon pyöreän metallilevyn , huomaatte että kääntövastus suurenee kierrosluvun mukana.
KP’n rakenteessa hyrrävoimat alkaa vaikuttaa noin metrin halkaisijalla olevassa pyörässä nopeudella 4-7 km. tunnissa. Suuremmilla nopeuksilla vaikutus tietenkin suurenee. Nopeassa ajossa ei maksimaalinen tartuntakyky olekaan tarpeen , vaan suurin tarve on ajovakavuus. Keinuvan pyörän kaikki toiminnot tapahtuvat samanaikaisesti , hitailla nopeuksilla ohjautuminen on nopeaa. Suuremmilla nopeuksilla hyrrävoimat jäykistää toimintaa. Toimintaa voi verrata kissan kynsiin , hitailla nopeuksilla kynnet esillä , suuremmilla nopeuksilla kynnet piiloon. Yleensäkin KP’n toiminta reagoi vain ajoalustan muutoksiin , nopeammin kuin mikään ohjaava tai säätävä teknologia.
Vertailu 1-1. Tämä on ainut vertailukohde jossa fysiikan lakien mukaan hyrrävoimat tietenkin toimii samalla tavalla. Kuitenkaan hitaissa työkoneissa jäykkä pyörä ei voi edes hyödyntää hyrrävoimia , eikä niistä olisi mitään hyötyä. Autojen ja moottoripyörien ajovakavuutta hyrrävoimat lisää. Akseliohjauksella hyrrävoimat ei vastusta kääntymistä , koska ohjaavat pyörät siirtyy lähinnä vain pituus-suunnassa. Sen sijaan KP’n rakenteessa suuremmilla nopeuksilla hyrrävoimat jäykistää itseohjautuvuutta. Yli 10km/h nopeuksilla ei tarvita kissankynsiä ja ajetaan jo kohtuullisen tasaisella alustalla.
Numero 9. Ajovakavuus. Jos tavallisesta autosta otetaan pois heilahduksen vaimentimet , joita kutsutaan iskunvaimentimiksi , ajovakavuus on mennyttä. Sisäänpäin joustossa , siis kun pyörä esteessä joustaa ylöspäin , jousitukseen varastoituu pyöräkuorman ja nopeuden yhteisvaikutuksen suuruinen vastavoima. Juuri tämän voiman välitöntä purkaantumista hillitään iskunvaimentimilla. Ilman hillitsemistä nämä voimat aiheuttaa pyörien pomppimista ja koko ajoneuvon heilumista. Eli vanhoissa rakenteissa itsessään ei ole kykyä vaimentaa heilahduksia.
Maastossa tarvitaan huomattavasti pidemmät joustovarat kuin maantiellä. Maantiellä tarvitaan vain muutamien senttien joustovaraa , maastossa mieluummin metri. Maastossa on runsas kokoelma erilaisia esteitä. Tarvittavat liikevarat ovat niin suuria että rautavieterit ja vanhat rakenteet eivät enää yksinkertaisesti riitä. Ratkaisu suuriin liikeratoihin on hydraulinen järjestelmä , jousisylinteri ja paineakku. Autoissa Citroenissa on käytetty pitkään vastaavaa jousitusjärjestelmää. Autoissa järjestelmään täytyy kuitenkin liittää heilahduksen vaimentimet.
Keinuvan pyörän itseohjautuvuus ns. neutraali kosketus muuttaa kaiken. Yhden tukivarren liikeradalla joustoliikkeessä tapahtuu aina myös pyörän sivuttaista siirtymistä. Joustoliikkeen johdosta varastoitunut energia ei purkaannu ”pomppuna” , vaan vasta myöhemmissä tilanteissa hallitusti. Tällä on erittäin suuri merkitys ajovakavuuteen. Ilmiö vastaa hyvin nopeaa reaaliaikaista jousivasteen säätöä. Lisäksi pyörä välittää mahdollisimman vähän ajoneuvoon kohdistuvia voimia , kuin myös vaimentaa ajoneuvosta pyörään kohdistuvia voimia.
Vertailu 9-1 KP’n hyväksi.
Numero 10
Säätökohteisiin lisätään vielä kymmenes vertailukohta. Edellä käytyjen toimintojen nopeutta voi säätää näiden kolmen nivelen asemaa muuttamalla. Jos nivelten asemaa siirretään hieman pyörän pyörimissuuntaan , toiminta hidastuu. Pyörimissuunnassa taaksepäin siirrossa toiminta nopeutuu.
Vertailu 10-1 KP’n hyväksi.
Vertailussa KP voitti ylivoimaisesti 9 vertailukohdetta , ominaisuuksista joita vanhassa pyörässä ei voi edes toteuttaa. Lisäksi KP’n ominaisuudet ovat täysin säädettävissä , tai tarvittaessa rajoitettavissa. Eri toimintojen hyötyeroista vanhaan verrattuna voi tietenkin esittää prosenttiluvuilla. Jos syvennytte toimintojen yksityiskohtiin on jopa helppoa arvioida eroprosentti. Kuitenkin kaikki toiminnot yhdessä muodostaa vasta suorituskyvyn uuden tason.
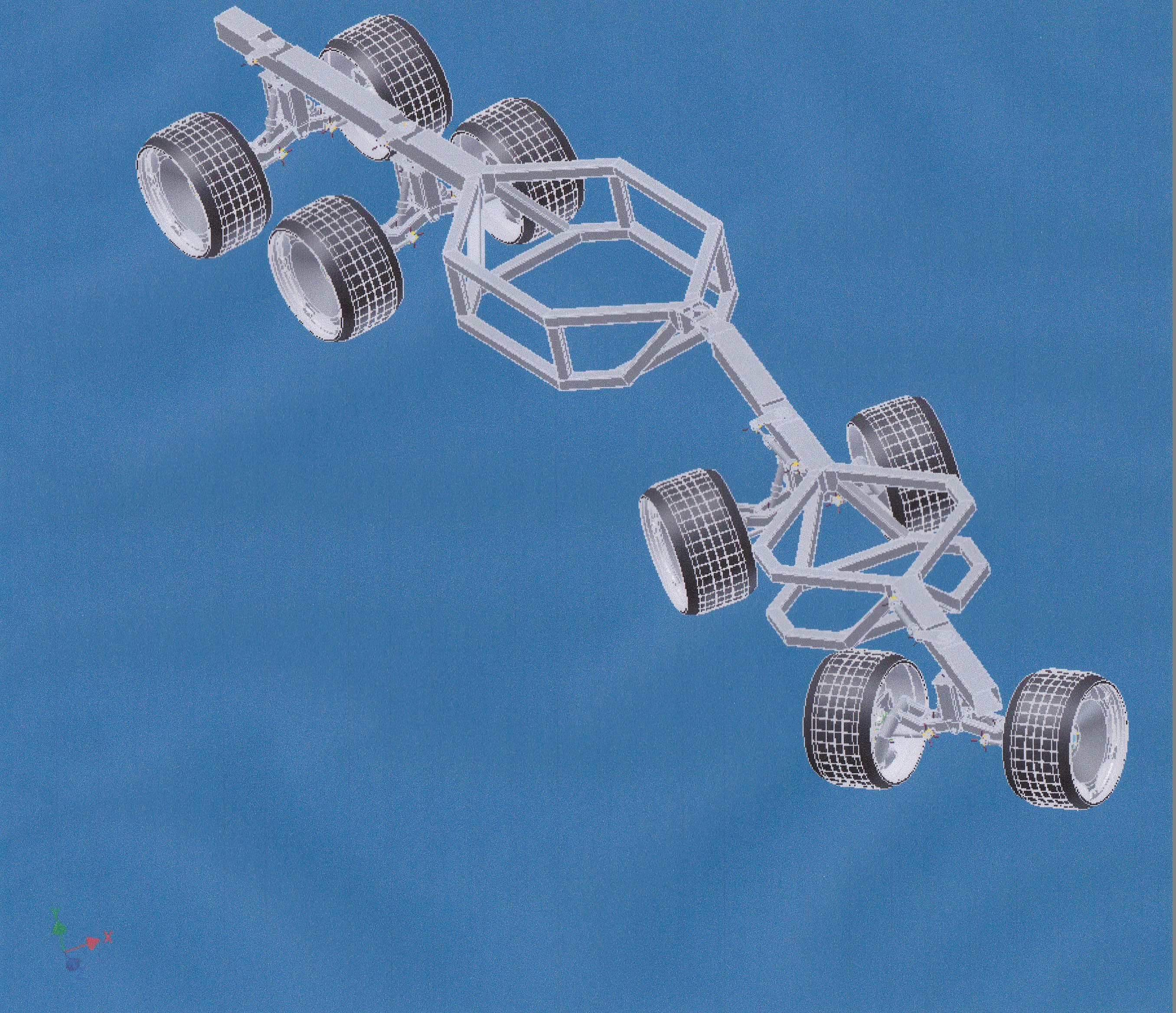
Maastoajon hyötysuhteen nostamisessa fysiikan lakeja ei voi ”rikkoa” tai kiertää. Edellä olen selostanut juuri näitä uusia toiminnan osa-alueita ja niiden vaikutusta kokonaisuuteen. Joka tapauksessa KP’n hyötysuhde maastossa on suhteellisesti aina ylivoimaisesti parempi , kun kaikki toiminnot toteutuu yhtä aikaa , hetkittäin ero on jo tuhansia prosentteja. Maantiellä hyötysuhde on täysin vertailukelpoinen vanhaan pyörään , paitsi että KP’n vetokyky on sielläkin parempi verrattuna vetäjän painoon. KUVA – 11 esittää työkonealustaa joka on tehty vaikkapa kaapelikelan sijoittamiseksi takarunkoon. Eturungossa on moottoritila jonka päälle ohjaamot sijoitetaan. Eturunkoa ja ympäripyörivää tai kiinteää umpinaista ohjaamoa esittää KUVA – 12.
Edellä esitetyistä ominaisuuksista johtuu hyötysuhteen nousu jopa yli parinkymmenen prosentin luokkaan. Ero hyötysuhteessa on suurempi kuta vaikeammassa maastossa toimitaan. Hyötysuhteen noususta huolimatta polttoaineen kulutus putoaa jopa viidesosaan. Tietenkin kulutus kilometrille on maastossa suuri , koska ajovastus on suuri verrattuna maantien vierintä vastuksiin. Tämä ajovastus on suoraan verrannollinen pyöräkuormaan. Maastoa vaurioittavat suuret pyöräkuormat korvataan nopeudella , eikä ajoalustaan synny vaurioita.
Näiden erillisten toimintojen olemassaolon pystyn näyttämään toteen jo koemallillakin.
Jotta lukijalle selviää paremmin näytelmän juoni maailmanlaajuisessa kehityskuviossa , otetaan mukaan muutamia esimerkkejä. Kaikki tutkimuslaitokset ja järjestöt esittelee omia luomuksiaan ”tulevaisuuden ajoneuvoina”. Kaikissa ulostuloissa esiintyy vain se vanha pyörä , mukamas käänteentekeviin alustoihin liitettynä. Eli siis se vanha vitsi pyörän uudelleen keksimisestä.
Nasan ja Jet propulsion laboratoryn (JPL) yhteinen ylpeys on Mars Roverit. Koska Marsissa energian jakeluverkko on vielä hieman keskeneräinen , Roverit käyttää aurinkoenergiaa. Energiankäytössä pihistely ja parempi suorituskyky olisivat silloin jopa toivottavia ominaisuuksia.
Vuonna 2015 Nasa on esitellyt ylpeänä myös modular robotic vehiclen , ajoneuvon jolla voi pyöritellä paikoillaan ja ajaa mihin suuntaan tahansa. Audin lunar quatro on aivan saman idean muunnos kuukilvassa. Nasa teki omat Mars Roverinsa ajelemaan marsperällä. Tarjosin Nasalle , MIT’le ja JLP’lle uutta teknologiaa jo paljon ennen Mars lentoja. Uusin tarjouksen USA’n suurlähettiläälle vuonna 2015 ja tarjosin myös konsultaatiota Nasan rovereille. Modular robotic vehicle ja Audin lunar perustuu jokaisen neljän pyörän samanaikaiseen ohjaamiseen samaan suuntaan , joten voidaan ajaa mihin suuntaan tahansa. ”Idea” on ikivanha , jo muinaisessa tavaran kuljetuksessa käytettävät ns. ”rullakot” ja lavat toimii aivan samalla tavalla. Kun tutkin erilaisia ohjausmenetelmiä , käsittelin saman ”idean” jo vuonna 94. Nämä esimerkit kertoo selvästi miten ”aatamin aikuisia” asioita esitellään suuren rahan saavutuksina. Suuren rahan suojelemiseksi on pystytetty myös kartellimuureja. Näiden ”suurten saavutusten” ajoneuvojen suorituskyky on sidottu niiden pyörien suorituskykyyn , taso selviää edellä kuvatuista toimintojen eroista.
Nasa , MIT ja JPL ovat vanhoja tuttuja sekä Afghan explorerin että Mars rovereiden osalta. Tämä Afghan explorer on pienikokoinen pahanpaikan ”reportteri” , joka varjolla laskeutuu kuvaamaan hankalia paikkoja ja siinä on sähköinen voimansiirto. Olen nähnyt yhden Lucasin elokuvan ja mielestäni nähdyt härvelit voisivat olla myös vähemmän jähmeitä. Pieni ripaus notkeutta ja kinetiikkaa ei olisi kovin pahasta. Myös Dean Kamen ja George Lucas ovat halunneet unohtaa PW’n kinetiikan ja dynamiikan. Maastoon sopiva kulkupeli syntyy myös mielikuvitusmaailman ulkopuolellakin KP’n rakenteilla.
ESA’n isokenkäinen Orlando delegoi van Winnendaelille yhteydenottoni , hän vastasi minulle ja ihmetteli rooliani , sekä halusi aikaansaada yhteistyötä muiden tutkijoiden kanssa. Joku , eikä se ollut Jaska Jokunen , oli kuitenkin nopea ja jatkossa tilanne vakiintui. Sama toistui erään espanjalaisen ekologian professorin kanssa. Se vakio on hiljaisuus. Non NIH , siis vähän niinku lappilaisittain lausuttuna. NIH on lyhenne sanoista not invested here. Tarkoitus on aivan sama kuin RIP , eli rest in peace. Dokumentit olen arkistoinut ja käytän niitä tarvittaessa.
Vastamomentin hyödyntämisen kyky on selvitettävissä hyvin yksinkertaisilla kokeilla. Koemalli Terrierin neljän napamoottorin yhteinen vetokyky 350 barin paineella , koemallin pyöräkoolla on 940-960 kiloa , mutta vasta nopeudella 10-13 kilometriä tunnissa. Suoravetoisen radiaalimoottorin vetokyky liikkeelle lähdössä voi olla hyvin vaatimaton. Voiman tuottamisen tiheyden syke on nollilla ja senhetkinen vääntö riippuu siitä , missä asennossa männät ja viistot vastaepäkeskot ovat. Juuri tästä syystä vetovoima suurenee ja vääntö tasaantuu vasta suuremmilla nopeuksilla. Liikkeelle lähdössä neljän pyörän vetokyky voi olla jotain 400-600 kilon luokkaa. Liikkeelle lähdössä vastus on suuri , tarvitaan ”piikki” massan saamiseksi liikkeelle ja ajovastuksen voittamiseksi. Varsinkin maastossa ajovastus voi olla liikkeelle lähdössä hyvin suuri , jopa suurempi kuin senhetkinen napamoottoreiden yhteinen vääntömomentti. Vastamomentin ilmenemisen vastavoima on ajoneuvosta tukivarren kautta kohdistuva paino tai ajovastus , eli siis liikettä vastustavat voimat.
Ostin rautakaupasta kuituköysiä joiden murtolujuudeksi ilmoitettiin 800-1200-1600 kiloa. Vetokoe suoritettiin pumpun ja kaasun samoilla vakioasetuksilla. Ettei vedossa pääse ”rempaisemaan” , köysi kiristettiin ennen koetta. Sen jälkeen moottori käynnistettiin startilla , tavallaan kuin ”vaihde päällä”. 800 kilon köysi katkesi kuin vanhan ajan paperinen puotinaru. 1200 kilon köysi venyi ennen katkeamista. 1600 kilon köysi venyi mutta keskeytin vedon kun napamoottorit kolisi turhan paljon tukivarren kaareen , nivel 3 ei pysty liikkumaan kuin alle 90 astetta puolelleen koemallissa. Kokeen loppu tulema on se , että vetovoima ainakin tuplaantuu.
”Virallisella” digianturilla ja varsinaisella protolla suoritetulla ”virallisella” kokeella saadaan sitten esille täsmäarvot. Aivan samoin muut osaominaisuudet mitataan. Kuitenkin sain suoran vastauksen omiin kysymyksiini , rakenne hyödyntää voimansiirron vastamomentin. Vastamomentin hyödyntämisellä on tietenkin hyvin suuri osuus hyötysuhteen nousuun. Tällä koemallilla pystyn näyttämään toteen vastamomentin hyödyntämisen myös ns. ”virallisessa kokeessa”.
Ajokokeissa ilmeni monia täysin uusia ilmiöitä. Terrierissä on jousituksessa vakio osista ”väkisin” ja halvalla kootut jousisylinterit , nesteen virtausreikää pohjassa olevan männän yläpuolelle jäi vain 5 milliä halkaisijaltaan reikään. Reikä on täysin riittämätön ja rajoittaa virtausta. Paineakut taas ovat täysin normaalit. Tilanne aiheuttaa sen , että jouston nopeus riippuu nesteen virtauksen reiän halkaisijasta , jonka pitäisi olla moninkertainen riittävään nestevirtaukseen. Tämän yksityiskohdan olisi voinut korjata , mutta halusin säilyttää koemallissa kaikki alkuperäiset yksityiskohdat. Varsinaisessa protossa jousena on tietenkin paineakku ja voimia välittävälle nesteelle järjestetään tietenkin riittävät virtauskanavat.
Vajavaisellakin jousituksella voi tehdä seuraavan kokeen , miten rakenne sietää erisuuruisia pyöräkuormia. Pulttasin takarunkoon parimetrisen palkin suoraan sivulle. Siihen ripustin toista sataa kiloa painavan kiven. Kivi aiheutti runkoon yli 200 kilopondimetrin sivuttaisen väännön. Ajoin saman reitin monta kertaa kiven kanssa ja ilman. Kiven kanssa tietenkin piti lisätä nestettä ja painetta oikean takapyörän jousitukseen. Tulos oli yllättävä , ajo vakaantui kiven kanssa. Rungon olisi pitänyt ”keikkua ristiin” ja aiheuttaa heijausta pituusakselin ympäri , koska vääntö ja pyöräkuorma olivat toispuolisia. Jos enemmän kuormitettu pyörä olisi aiheuttanut enemmän vastusta , se olisi aiheuttanut epävakautta esteissä ja ajossa. Mitä nämä ilmiöt kertoo. Sen että rakenne sietää eri suuruisia pyöräkuormia ja vakavuus pysty ja sivusuunnassa säilyy. Tähän ilmiöön ja ajon vakauteen liittyy pyörän sivuttainen siirtyminen joustoliikkeessä. Itse ohjautuminen ja neutraali kosketus säilyy saman akselin pyöräkuormien erilaisuudesta huolimatta.
Koeajoilla höyläsin ns. ”testimonttua” hyvin monta kertaa. Tällä halusin testata pyörän aiheuttamaa rasitusta , eli ajoalustan kulutuskestävyyttä. Vasta kymmenien ajokertojen jälkeen jäljet kertoo suoraan todellisen luiston määrän. Vaikuttavinta kokeessa oli se , että testimontun ylöstulo reunassa ei ollut enempää jälkiä kuin alastulo reunassa. Otin kuvan silloin tästä testiradan kunnosta. Samat asiat näkyy vuosikausia nettisivuillani olleista videopätkistä. Neutraalin kosketuksen ja painon siirtymän vaikutus on todella ratkaisevaa luistottoman pitokyvyn ohella , juuri luistoistahan johtuu suurin osa ajojäljistä.
Noin 150 tunnin koeajojen jälkeen olin jo vakuuttunut ja varmistunut uusien ominaisuuksien merkityksestä. Asetusarvoja en ryhtynyt muuttamaan , ne kuuluu varsinaiseen säätöjen vaikutuksen tutkimusohjelmaan , kuin myös varsinaisen proton testaus ohjelmaan. Jo rakenteesta johtuu että KP’n ominaisuudet toteutuu vain eteenpäin ajettaessa , pakilla pyörät ”karkaa” omille teilleen. Siihen voidaan vaikuttaa lukitsemalla 3 nivel. Sinänsä pakitustarve on olematonta , alusta kääntyy niin pienessä ympyrässä. Ns. ”vekslaamalla” voidaan tehdä todella vaativia ja vaikuttavia suorituksia.
Nyt sitten herää kysymys eikö KP pysty parantamaan hyötysuhdetta kuljetuksissa myös maantiellä. Pystyy kyllä parantamaan pintapaineen jakautumista , vaimentamaan ja ohjautumaan joustoliikkeessä paremmin , sekä parantaa vetokykyä. Näiden erojen merkitys on tasaisella alustalla hyvin pieni , mutta silläkin voi olla suurta merkitystä monissa tilanteissa. Ratkaisevimmat tekijät toimintojen hyödyntämisessä jää maantiellä pois , maantiellä kun ei ole kiviä ja kantoja. Vetokyky verrattuna omapainoon on tasaisellakin aina parempi.