Akseliohjaus ja V runko
Kun pyörään petyttiin tosielämän kaikenkelin kenttäkokeiluissa , heti toisen suuren sodan jälkeen haettiin apua kävelytekniikasta. Leluissahan oli käytetty jo kauan ja paljon aiemmin yksinkertaisia kampirakenteita , aivan samaa systeemiä käytettiin myös suuressa Marion kaivinkoneessa. Marionin heittokauhalla ruoppailtiin myös Oulujoki latvoineenkin voimalaitoksille sopivaan muotoon. Jo viisikymmentä luvun alussa kokeiltiin ympäri maailmaa myös kuudella jalalla jotka oli varustettu nivelillä , eli matkittiin hyönteisten kävelyä. Sen ajan analogisella reletekniikalla , ja manuaalisella raajan releiden räpyttelyllä ohjattiin liikuttelua , eikä kokonaisuuden ohjaus oikein onnistunut. Ei ole todellakaan helppoa siirrellä yhtaikaa käsin ja jaloin kuutta raajaa tilanteen mukaan , kuljettajan kädet ja jalat siinä loppuu ja keskuslaskin sekoaa. Ainakin kolme jalkaa aina maassa ja kolme siirrossa. Aron liejuun olisi sekin kävely tyssännyt , ja konetta kiertäessä lieju olisi siepannut kuskilta vielä saappaatkin.
Vasta 90 luvun prosessori ohjaus toi helpotusta liikkeenhallintaan. Siltikään kävelytekniikka ei ole leluja raskaamman logistiikan pelastaja. Jos raajan siirrossa tunnustellaan raajan liikeradan esteet ja siirtokohdan kantavuus , varsinaiseen painonsiirtoon ja etenemiseen tuhlaantuu liian paljon aikaa. Nopeus jää niin alhaiseksi , ettei tehokkuus riitä alkuunkaan , myös kääntyminen on toivottoman hidasta. Vähin vaatimus maastoajon logistiikalle on se , että ajoneuvoa voi hinata , jos se menee epäkuntoon. Suuren rahan Pentagonin ja Darpan viimeisimmätkin robotit pystyy hölkkäämään vain tasaisella kantavalla alustalla. Jalan kantopinta on maastossa rajallinen eikä auta suollakaan. Tasaisilla kantavilla alustoilla sitä voi käyttää , jos joku keksii tarvetta. Mekaaninen kävelytekniikka ei yksinkertaisesti toimi pehmeällä ja epätasaisella alustalla. Kokeilut kuitenkin osoittaa että kaikki mahdolliset keinot , rahat ja resurssit on käytetty maastossa liikkumisen pulmien ratkaisemiseksi.
Maastossa liikkumisen perusongelma on edelleen vanha pyörä , eikä edellä esitettyjä ongelmia ole pystyneet ratkaisemaan edes suuren rahan organisaatiot. Pyörä on edelleen pyörintäakselille pultattu napansa ympäri pyörivä ympäripyöreä ajoneuvon osa. Eipä siinä akselilta irrotetussa jäykässä osasessa ole mitään säädettävää , vain sen ripustuksella voi hieman vaikuttaa käyttäytymiseen.
Tässä oli lähtökohta omalle tutkimus ja kehitystyölle. Perustana oli tietenkin kaikki aiemmin hankkimani ja havaitsemani tieto ajoneuvojen ja pyörän toiminnasta. Uusien asioiden kuvaajana sana keksintö on kaluttu loppuun , ja tuo mieleen vanhan ”keksi sinäkin Hangon keksit” mainoslauseen. Innovaatiotkin on jo kaluttu loppuun vähemmän innovatiivisella jankuttamisella. Kun kasinotalous romahti 90 luvulla , Nokian avulla vivuttiin eteenpäin. Huipulla tuulee ja Nokian jälkeen sanan merkitys ja arvo haihtui hokemiin pelastavista innovaatioista , joita ei kuitenkaan löytynyt.
Itse käytän sanaa tutkimus. Sitähän se on , asioiden tutkimista ja ratkaisujen löytämistä. Tietysti tutkimalla voi löytää suuria tai pieniä asioita. Perustutkimusta on taas se , joka tuottaa aiemmin tuntematonta tietoa. Aloitin järjestelmällisen tutkimuksen ajoneuvojen pyörien sijoittelun ja runkorakenteen mahdollisuuksista. Piti löytää rakenne jolla voi välttää vanhojen varjopuolia liikuntakyvyssä. Ajauduin omaehtoisen ja omalla kustannuksella perustutkimuksen alueelle. Keinuva pyörä löytyi sitten pikkuhiljaa matkan varrella.
Tietysti hetken oivalluksessa pystyy usein löytämään hyviä perusasioita. Enimmäkseen tutkimus on kuitenkin loputonta vaihtoehtojen hakemista , niiden hylkäämistä ja hiomista. Kehitys on pitkäveteistä ja vastaukset ongelmiin kypsyy ajan myötä. Vuosikausia alitajunta voi käsitellä jotain ongelmaa , tajuntaan putkahtaa asioita jotka auttaa eteenpäin , tai hylätään ja palautetaan takaisin jatkokäsittelyyn. On asioita jotka eivät yksinkertaisesti ratkea kuin porras portaalta etenevänä kehityksenä. Kun pääsee seuraavalle portaalle , sieltä aukeaakin aivan uudet näköalat. Nimenomaan ympäristön hyödyntämisessä uudet rakenteet ja logistinen ketju voi olla käyttökelvoton yhden ratkaisevan yksityiskohdan puuttuessa.
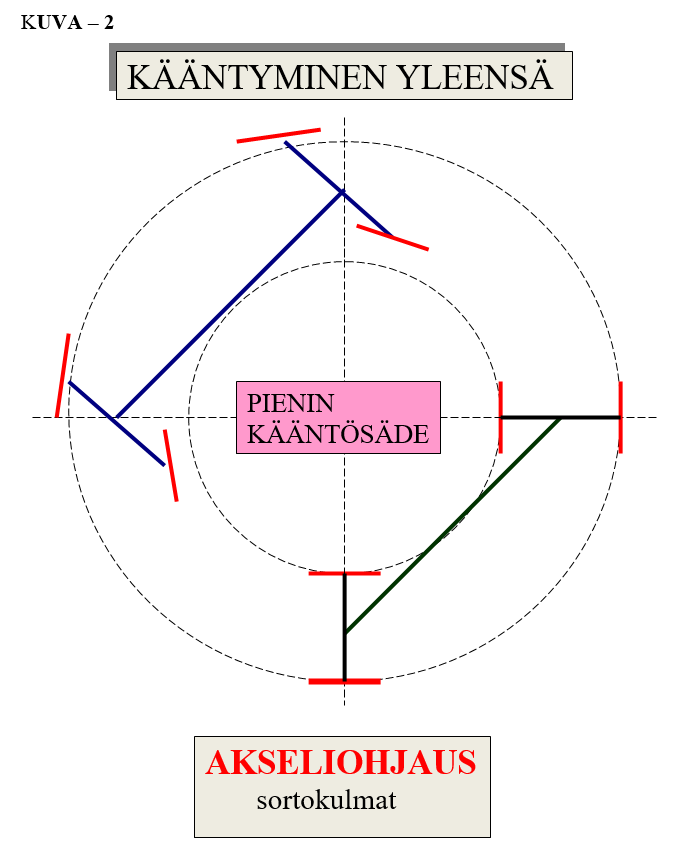
Rakensin rimarungoista ja lastulevystä reikäsahalla irrotetuista pyöristä kaikki mahdolliset perus työkoneen alustamallit , pyörä ohjaus , runko-ohjaus , moninivel runko. Kokeilin 3D’nä käytännössä liikehtimiskyvyn. Harppi ja viivoitin riittää pitkälle geometrisissä analyyseissä , mutta sortokulmat tulivat kaikkialla vastaan. Ilman jatkuvasti muuttuvaa erillisohjausta , eripuraisuutta pyörien välillä ei voi välttää , varsinkaan kaarreajossa. Esteitä väistellessä maastossa ja metsässä on paljonkin kääntymisen tarvetta. Ketterämmällä kääntymisellä voi väistää jonkun esteen tarvitsematta kohdata sitä ollenkaan.
Historiassa viitataan usein aikaan ennen ja jälkeen Rooman aikaa. Rooman aikaan taisteluvaunut olivat yksiakselisia , työvankkurit kaksiakselisia. Jopa ennen Rooman aikaa ensimmäistä kaksiakselista ajoneuvoa ohjattiin kääntämällä etuakselia. Servona toimi ajan moottori , eli vetojuhdan voima. Vaikka rakenne on vanha , edelleen on etevä , saman akselin pyörillä on käännöksissä luonnostaan sama kääntöympyröiden keskipiste. Siinä pisteessä oli ensimmäinen löytynyt jyvä.
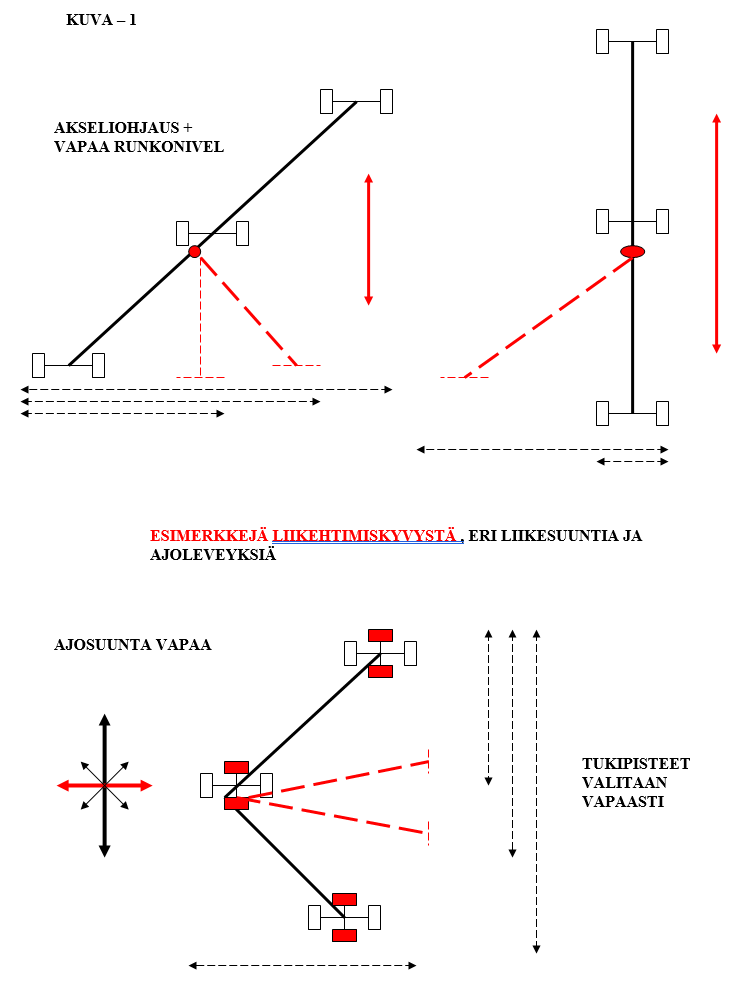
Omissa tutkimuksissa alustan liikehtimiskyvyn ratkaisi lopulta juuri se akseli ohjaus , sekä kahden runkopalkin välinen vapaa nivel. Tasapainon takia etuosassa kaksi akselia , takaosassa ainakin yksi. Modernimmalla versiolla akseleita voi ohjata ilman vipuviidakkoa , joko kaikkia akseleita yhdessä , tai täysin yksittäin ja erillisesti. Liikehtiminen on jo aivan omaa luokkaansa jos vertaa muihin järjestelmiin. Moniakselisissa alustoissa akselin kääntökulma voi olla jopa ± 90 astetta. Etu ja takarungon välinen kulma voi vaihdella lähelle ± 180 astetta. Jos akselin kääntökulma on ± 45 astetta , ja jos etu ja takarunkojen välinen kulma on 90 astetta , tässä rungon V asennossa sillä voi ajaa akseleita kääntämällä mihin suuntaan tahansa. Eteen – taakse , vasemmalle – oikealle. Tällä rakenteella on mahdollista myös L muoto , jolloin akseleiden kääntyminen on ± 90 astetta. Akseli pystytään siis kääntämään myös runkopalkin suuntaiseksi.
Tämä V asento ratkaisee myös taakan noston ongelman. V’n sisältä voi nostaa suurempia taakkoja kuin raskailla vanhoilla koneilla , joiden paino toimii vastapainona. Kolmen pisteen tuenta on vakaa luonnostaan. Eli siis uudella kevyelläkin työkoneella voi nostaa ilman tukijalkoja suurempia taakkoja kuin kymmenien tonnien painoisella vanhalla koneella. Koska tässä samassa asennossa voidaan ajaa mihin suuntaan tahansa , päästään hyvin lähelle ideaalista noston lähtökohtaa. Tällaisella alustarakenteella päästäisiin jo hyvin pitkälle eroon vanhojen alustojen vaivoista , ei kuitenkaan vanhan pyörän vaivoista.
Rauennut hyödyllisyysmalli 1712 koskee juuri tätä akselisto ja runkorakennetta. Se on siis nykyään vapaata riistaa koska suojaus raukesi mallisuojan kanssa. Se oli ensimmäinen patentti , tai mallisuoja joka haettiin. Jo se ratkaisi paljon työkoneiden ja maastoajon pulmia. Ketteryys lisääntyy ja sortokulmia voi vähentää ratkaisevasti. Tämä alustarakenne muodostuu täysin samanlaisista erillisistä akseleista. Akselin molemmat pyörät ovat aina saman kääntöympyrän eripituisilla säteillä. Voimansiirron ongelmissa on hyvä uutinen se , että kääntöympyrässä yhden akselin pyörien kulkeman matkan tulos on tavallaan vakio , kun toisen pyörän kehänopeus hidastuu , toisen suurenee. Se sopii erittäin hyvin hydrauliselle voimansiirrolle.
Tällä rakenteella mekaaninen voimansiirto edelleen takertelee ja johtaa turhan suuriin vaikeuksiin , jo pelkästään voimaa välittävien akseleiden osalta. Kardaanien nivelöinti ja vaihtuva pituus ovat ongelma , samoin pyörien vetoakselit ja erillisjousitus lisää ongelmia edelleenkin.
Tietysti olisi mahdollista että mekaanisen voimansiirron kardaanit sijoitettaisiin runkoputken sisään , mutta rakenne olisi turhan kallis hyötyihin nähden.
Jos ei huomioida vanhan pyörän ja sen voimansiirron ongelmia , monta muuta ongelmaa ratkeaa. Jo yhden akselin kääntämisen avulla koko ajoneuvon asentoa voi muuttaa valtavasti , liikkeessä tai paikoillaan. Kaikkien akseleiden samanaikaisella ohjauksella syntyy johdonmukaista hallittua kokonaisuuden käyttäytymistä erilaisissa maaston esteissä. Jos runko on tikkusuorassa alkuasennossa , pystytään saamaan hetkessä 90 asteen kulma etu ja takarungon välille kaikkien akseleiden ohjauksella , lähes ilman etenemistä pituus suunnassa. Etu ja takarunko liikkuu lähinnä vain sivuttaissuunnassa. Hankalissa paikoissa sivuttaista tukea ajoon voi ottaa etu tai takapäätä poikkeuttamalla sivusuuntaan. Samoin kaksi erillistä rungon osaa ja niiden akselistot voi sopeutua aina kaikkiin maaston muotoihin. Runkopalkkien nivelkohtaan voi lisätä vapaan kiertoliikkeen nivelen , kuin myös kiertoliikkeen tai taivutuksen lukituksia maastoajon operaatioissa.
Ajoneuvon akseleiden asennolla suhteessa runkoon voidaan muuttaa ajoleveyttä portaattomasti. Runko suorana kuin juna , tai kaikki akselit 45 astetta käännettyinä samansuuntaisiksi mennään 45 asteen ”kylkimyyryä” ajosuuntaan nähden. Akseleiden kääntökulmaa muuttamalla suhteessa runkoon työleveyttä voi säätää portaattomasti itse ajoneuvolla. Akselit säilyy aina kohtisuoraan ajosuunnassa , eli niihin kiinnitetyt työvälineet säilyttää teholeveyden jatkuvasti. Tämäkin on lähes mahdotonta muilla ohjausjärjestelmillä. Lisäksi rungon ohjausjärjestelmä antaa täyden vapauden ottaa sivusta tukea ajossa joko etupäätä tai takapäätä poikkeuttamalla.
Työkoneissa ketteryys ja liikehtimiskyky on ratkaisevaa. Pyörä ohjauksella ja telaketjuilla voi kyllä pyöriä paikoillaan , samalla kaivaa monttu josta ei pääse pois. Tähän tuhlaantuu voimaa ja rikotaan ajoalusta. V runko ratkaisee tämänkin ongelman. Otetaan yksi esimerkki , se toimii jos voimansiirto ei ole esteenä. Sähköisellä ja hydraulisella voimansiirrolla voidaan käyttää pyörän sisäisiä napamoottoreita , eli vältetään kaikki mekaanisen haitat. Jos pankolla on vaikkapa 6 metrinen tukki , koko ajoneuvo kääntyy ympäri ympyrässä jonka halkaisija on 6 metriä. Pienempään ei pääse , jos tukista aiotaan tehdä pitkää lautatavaraa. Tässä käännöksessä ei rikota ajoalustaa. Edes lähellekään vastaavaan ei päästä kuin pakkotoimisella lukitulla pyöräohjauksella , joka rikkoo täysin ajoalustan. Kaikilla muillakin akseliohjauksen kanssa kilpailevilla ohjausjärjestelmillä ei päästä maastossa edes samoille metri , tai jopa samoille kymmenien metrien luvuille kääntösäteessä.
Jos keskeltä laakeroitua ohjaavaa akselia kääntää paikoillaan , vain pyörät pyörii akselin päissä , eikä ajoneuvo edes liiku. Tätä mahdollisuutta ei ole millään muulla akselirakenteella. Eli nopeissa jyrkissä suunnanmuutoksissakaan ei turmella ajoalustaa. Käännöksissä saman akselin molemmat pyörät ovat automaattisesti samalla suoralla , jonka keskipiste on kääntöympyrän keskipiste. Samanaikaisesti muut akselit noudattaa omia ajosuuntiaan , joista sitten muodostuu koko ajoneuvon liikehtiminen.
Akseliohjauksella on muiden etujen lisäksi myös erittäin ylivoimainen ominaisuus. Työkoneilla liikutaan usein hyvin ahtaissakin paikoissa , eli mahdollisuus teloa konetta tai ympäristöä on suuri. Pyörät uloimpina osina osuu yleensä niihin tarkoittamattomiin kohteisiin. Täyshydraulisessa järjestelmässä työkoneen akseleita käännetään hydraulisilla sylintereillä. Jos ajoneuvon joku pyörä osuu tahattomasti johonkin esteeseen , se aiheuttaa vastusta kääntösylinteriin , ja se ”laukeaa vapaalle”. Akseli alkaa siis pyöriä kääntötapin ympäri , ja automatiikka samaan aikaan kääntää vetopuolen pumpun tuoton nollille ja ajoneuvo pysähtyy hallitusti. Muilla rakenteilla tulisi asiaa korjaamoon ja varaosa kauppaan.
Monta jyvää oli jo löytynyt. Akseliohjaus ja V muotoon taipuva runko sopii jo pelkästään uuden tekniikan työkoneen liikehtimiskyvyn parantamiseen. Maastossa toimivien työkoneiden valmistajiin tutustumisen kierroksillani olin tässä vaiheessa tehnyt jo yhden kättä päälle sopimuksen suuren metsäkonevalmistajan kanssa , mutta sen tekijän suu sinetöitiin jo heti seuraavana aamuna. Olikohan päälliköt asialla. Vanhan pyörän heikkoudet ja voimansiirron vaikeudet säilyi edelleen ja perustavaa laatua olevaa tutkimusta täytyi jatkaa.